
| Basic Research | https://doi.org/10.21041/ra.v13i1.611 |
Sistema embebido basado en reglas aplicado a la determinación de la salud estructural en edificios de varios niveles.
Rule-based embedded system applied to determine the structural health of multilevel buildings Sistema incorporado baseado em regras aplicado à determinação da saúde estrutural em edifícios multiníveis
F.
Ramírez-Cervantes1
*
![]() ,
F.
García-Lamont1
,
F.
García-Lamont1
![]() ,
D. G.
Maxinez2
,
D. G.
Maxinez2
![]() ,
J.
Ayala1
,
J.
Ayala1
![]() ,
R.
García3
,
R.
García3
![]()
1 CU-UAEM Texcoco, Universidad Autónoma del Estado de México, Texcoco, Estado de México, México.
2 FES Aragón, Universidad Nacional Autónoma de México, Nezahualcóyotl, Estado de México, México.
3 CU-UAEM Ecatepec, Universidad Autónoma del Estado de México, Ecatepec, Estado de México, México.
*Contact author: framirezc@uaemex.mx
Recepción:
22
de
mayo
de
2022.
Aceptación:
13
de
diciembre
de
2022.
Publicación: 01 de enero de 2023.
| Citar como:Ramírez-Cervantes, F., García-Lamont, F., Maxinez, D.G., Ayala, J., García, R. (2023), “Sistema embebido basado en reglas aplicado a la determinación de la salud estructural en edificios de varios niveles”, Revista ALCONPAT, 13 (1), pp. 28 – 44, DOI: https://doi.org/10.21041/ra.v13i1.611 |
Resumen
El objetivo de este trabajo fue desarrollar un sistema basado en reglas que apoye la determinación de la salud estructural de edificios de varios niveles. Se utilizan técnicas de descripción de hardware mediante lógica programable empleando integración de entidades y diseño jerárquico con programación VHDL. El sistema se embebe en una FPGA que, mediante un algoritmo, integra una primera etapa donde un grupo de sensores de ultrasonido recolectan una medida que se interpreta para obtener el desplazamiento relativo de entrepiso. En la segunda etapa un motor de inferencia realiza la evaluación. Se presentan resultados utilizando un modelo experimental donde se verificó que el sistema fue capaz de determinar la estabilidad de la estructura con base en el parámetro desplazamiento relativo de entrepiso.
Palabras clave:
monitoreo de salud estructural,
desplazamiento relativo,
lógica programable,
sistema basado en reglas.
1. IntroducciÓn
El monitoreo de la salud estructural SHM, Structural Health Monitoring, por sus siglas en inglés, basado en la tecnología de sensores ha sido aceptada como un método importante para las evaluaciones de seguridad de estructuras en ingeniería. En SHM, las respuestas de una estructura se miden tradicionalmente utilizando diversas tecnologías tales como acelerómetros (Arias y De la Colina, 2018), sensores de fibra óptica distribuida (Bao y Chen, 2012), sensores de desplazamiento láser LDS, Laser Displacement Sensor, por sus siglas en inglés (Song et. al., 2006; Park et. al., 2013), sistema de posicionamiento global GPS, Global Positioning System, por sus siglas en inglés, (Tamura et. al., 2002; Breuer et. al., 2002) y transductores de desplazamiento lineal variable LVDT, Linear Variable Displacement Transducers, por sus siglas en inglés, (Arias y De la Colina, 2018), sensores inalámbricos (Li et. al., 2019; Guo et. al., 2014; Zrelli y Ezzedine, 2017), y circuito puente de Wheatstone (Li y Hao, 2016). Así mismo, para este propósito se han empleado diversas técnicas de procesamiento y evaluación de datos como lo son el aprendizaje profundo (Li et. al., 2019; Guo et. al., 2014), optimización por enjambre de partículas PSO, Particle Swarm Optimization, por sus siglas en inglés, (Chatterjee et. al., 2017; Moosazade et. al., 2019), y algoritmos genéticos (Ghasemi et. al., 2018). Finalmente, los datos se transfieren a un servidor de monitoreo para el análisis de la información histórica registrada y evaluación por los especialistas del área. Las características de la estructura y de las diversas cargas (carga de viento, carga sísmica, y carga de servicio) determinan los elementos estructurales objetivo, los tipos de respuesta y los sensores de medición requeridos. Por lo tanto, la selección de un índice de respuesta que pueda evaluar con precisión el daño a una estructura es fundamental.
Para el desarrollo de aplicaciones a nivel de microelectrónica se emplea una metodología de diseño de circuitos integrados para aplicación específica ASICs, Application-Specific Integrated Circuits, por sus siglas en inglés, que presenta varias alternativas de desarrollo (Maxinez y Alcalá, 2007). La lógica programable es un tipo de diseño que mediante la utilización de dispositivos lógicos programables PLDs, Programmable Logic Devices, por sus siglas en inglés, como los son los arreglos de compuertas programables en campo FPGAs, Field Programmable Gate Arrays, por sus siglas en inglés, que se pueden caracterizar desde el exterior mediante diversas técnicas de programación utilizando un lenguaje de descripción de hardware HDL, Hardware Description Lenguage, por sus siglas en inglés.
El objetivo de este trabajo es aportar una propuesta de desarrollo de un sistema electrónico que es capaz de determinar la estabilidad de una edificación de varios pisos basado en la evaluación de la medida de desplazamiento relativo de entrepiso que es obtenida por una red de sensores de ultrasonidos y que adquieren medidas directamente de los elementos estructurales verticales de manera no invasiva.
2. Desarrollo metodolÓgico
En esta sección presentamos el desarrollo de nuestra propuesta, primero planteamos las especificaciones y los escenarios, para iniciar entonces con el modelado de la propuesta, continuando con el planteamiento de los algoritmos solución y su programación, finalizando con la implementación del sistema.
2.1 Especificaciones y escenarios
El parámetro más importante para la determinación de la magnitud de los posibles daños en las edificaciones es la distorsión de entrepiso γ, esto es, el desplazamiento relativo del entrepiso ∆, dividido entre la altura de entrepiso H.
 |
En la ecuación (1) se puede observar que la distorsión de entrepiso es un parámetro adimensional, pues tanto Δ como H tienen dimensiones de longitud, y se puede usar en términos porcentuales Para evaluar nos basamos en lo establecido por Paulay, (2001) el cual propone que la medida de desplazamiento medio permisible será entre el 2.0 y 2.5 % de H, a partir de esta premisa se construirá la tabla del motor de inferencia del sistema y a partir de esto el sistema reaccionará de una manera predeterminada para activar los actuadores previstos.
El caso práctico no es un caso general, se plantea específicamente para una estructura con una geometría rectangular bien definida para lo cual se utiliza el modelo de una estructura de seis niveles con altura de cada entrepiso H i = 3.5 m, de vértices flexibles en cada nivel para la generación de las inclinaciones. La finalidad del modelo empleado es únicamente la de recolección de medidas para la obtención del desplazamiento relativo de entrepiso y los esfuerzos analizados son de carácter monodimensional, puesto que, si fuesen de otra manera, habría que analizar una geometría general con esfuerzos de carácter vectorial que pueden provocar desplazamientos en más de una dirección, inducir rotaciones, modos de vibración transversales, longitudinales, torsionales, etcétera. Por lo tanto, es importante mencionar que el análisis queda acotado al esfuerzo monodomensional en la estructura rectangular libre de vibraciones.
Para obtener el valor del estado límite inferior del caso planteado utilizamos la ecuación (1) y la planteamos de la siguiente manera:

Debemos considerar que el 2.0% de H i es 0.07m. Entonces para el caso planteamos:
 |
Para obtener el máximo desplazamiento medio permisible de la estructura completa, se emplea el desplazamiento medio multiplicado por el número de niveles, en este caso se obtienen el desplazamiento relativo de entrepiso límite inferior:

De la misma manera para el obtener el valor del estado límite superior, debemos considerar que el 2.5% de H i es 0.0875m. Y obtenemos:
 |
2.2 Modelado
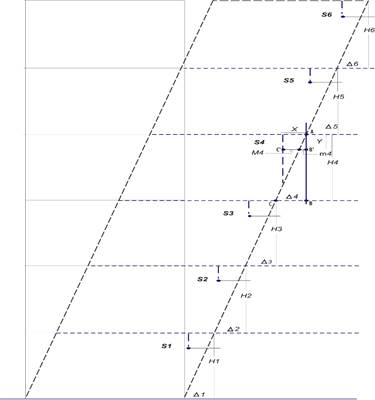
En una primera etapa, para obtener la medida del desplazamiento relativo del entrepiso de una estructura modelo de seis niveles se plantea desarrollar el bloque Sistema Sensor de Desplazamiento Relativo Ultrasónico en Péndulo (SSDRUP), en el cual se calcula la medida desplazamiento relativo de entrepiso, para esto se diseñó un sistema que integra una red de sensores ultrasónicos HC-SR04 de alta capacidad colocados suspendidos en el techo del entrepiso para obtener la medida de desplazamiento relativo en puntos específicos de una edificación, los sensores son los elementos capaces de obtener el parámetro de una señal física que se acondiciona en una señal conveniente para su interpretación, y así integrar estas a un sistema de adquisición de datos para adecuar las señales obtenidas en datos que podamos procesar en la etapa de análisis. En la Figura 1 se observan los parámetros a considerar: medida obtenida por el sensor M i , medida de la base del triángulo semejante que se genera en el triángulo del lado derecho m i , desplazamiento relativo del entrepiso ∆ i y la altura del entrepiso H i , que es un dato conocido. Cuando la estructura sufre una inclinación, los sensores para M i por efecto de la gravedad permanecerán en la vertical original del eje de las ordenadas, la pared del entrepiso seguirá la inclinación del entrepiso, con lo cual al realizar la proyección de la inclinación debemos considerar que las referencias de los ejes coordenados se trasladan y que dicha proyección describe dos triángulos, podemos identificar que ambos triángulos contienen dos triángulos semejantes que cumplirían con el primer teorema de Tales, luego, aplicando las relaciones de semejanza para triángulos semejantes podemos obtener el valor de las bases, observando que la base del triángulo del lado derecho, como lo representamos en el diagrama, lo identificamos como el desplazamiento relativo del entrepiso ∆ i . La medida M i que obtiene cada sensor varía, sufriendo una disminución que se utilizará para que, mediante la relación de similitud aplicable al caso se pueda obtener la longitud de la base del triángulo de la derecha, que, como se indica, corresponde al desplazamiento relativo del entrepiso ∆i. Con estos datos se calcula la distorsión del entrepiso de cada nivel y se determina cuál de las medidas es la mayor para entrar en la evaluación de estado límite.
 |
||||
| Figura 1. Parámetros para la medición de los desplazamientos relativos de entrepiso. | ||||
Como ya se explicó podemos basarnos en el primer teorema de Tales y plantear una relación para triángulos semejantes:
 |
Identificando elementos tenemos que:
La medida AB = H
La medida B´C´= m
La medida m = X - M
La medida BC = ∆
Entonces de la ecuación (6) tomamos:
 |
Sustituyendo obtenemos:
 |
Despejamos para ∆ y obtenemos la expresión:
 |
En una segunda etapa se recibe el valor de la medida de desplazamiento relativo de entrepiso cuya magnitud es la mayor de las seis que se determinaron, este parámetro será la variable de entrada a un sistema basado en reglas (SBR), el análisis se hará con base en los principios de lógica difusa para el cual primeramente asignamos un universo de discurso en el rango deseado, en este caso de 0cm a 70cm, siendo que 0cm representa el estado inicial y calibrado de la perpendicular del edificio y su base, y 70cm consideramos un valor suficientemente permisible ya que de los cálculos obtenidos en (4) y (5) el estado límite para el caso se encuentra entre 42.0cm y 52.5cm con lo cual determinamos plantear los límites entre los 39.0cm y los 53.0cm lo cual significa que una medida superior a los 53.0cm representaría que la estructura se encontraría en peligro de desplome, por lo cual el rango que planteamos es más que suficiente para permitir que el sistema de inferencia pueda funcionar en un mayor rango a los límites establecidos y no actuar inmediatamente se excedan esas medidas.
Con esta consideración determinamos emplear cuatro funciones de membresía: dos trapezoides y dos triangulares, para dar significado a cada variable lingüística. Cada función de membresía identifica el rango de los valores de entrada que corresponden a una variable lingüística, las funciones de membresía mapean a los datos presentes para determinar el grado de membresía. Esto es, los valores físicos de la variable de entrada que es la mayor de las medidas obtenidas por los sensores se convierten en valores lingüísticos.
En la Tabla 1 mostramos los rangos como queda particionada la variable de entrada, estos rangos se definieron de manera subjetiva con el apoyo de un experto, quien ajusto dichos rangos para que el comportamiento de la medida de entrada observará la correcta asignación de membresía a la función en la cual obtuviera el mayor valor.
| Tabla 1. Rangos de la variable de entrada DESP_REL. | ||||||||||||||
| Conjunto | Rango (cm) | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ESTABLE | 0 - 39 | |||||||||||||
| REGULAR | 32 - 46 | |||||||||||||
| LIMITE | 39 - 53 | |||||||||||||
| PELIGRO | 46 - 70 | |||||||||||||
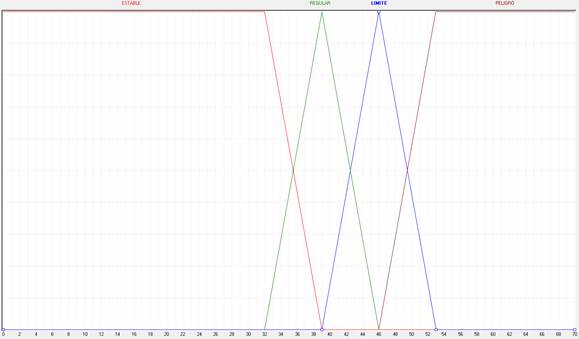
Aplicamos lo que hemos determinado y alimentamos el software fuzzyTECH empleando una función de membrecía para cada rango establecido siendo estas dos triangulares y dos trapezoides. En la Figura 2 podemos identificar las funciones de membresía para la variable de entrada DESP_REL que corresponde a la mayor de las medidas de desplazamiento relativo y que se definen con los términos lingüísticos: ESTABLE, REGULAR, LIMITE y PELIGRO, Las cuatro funciones de membresía empleadas permiten que los rangos límite calculados para el caso práctico no activen las salidas hacia los actuadores al alcanzar un límite máximo; esto es, el proponer dos funciones de membresía triangulares para los términos REGULAR y LIMITE permite manejar valores entre 32.0 cm y 53.0 cm para identificar el valor de membresía de un valor físico de la variable de entrada para poder observar el comportamiento de esta y en este rango se asigne un grado de pertenencia que corresponda a una variable lingüística que nos permita dosificar el funcionar de los actuadores en la fase siguiente.
 |
||||
| Figura 2. Funciones de membresía de la variable DESP_REL en el rango [0-70]. | ||||
Ahora extraemos de manera conveniente los rangos para cada función de membresía, para describir cada uno de estos empleamos la ecuación de la recta punto pendiente y obtenemos:
 |
Tercera etapa: Razonamiento. Este proceso de inferencia determina la salida más adecuada del sistema a partir de dos implicaciones, por un lado, los datos de entrada y por otro la base de conocimiento. La inferencia es un cálculo que consta de dos pasos principales: agregación y conclusión. Nos permitirá obtener deducciones lógicas a partir de proposiciones. El conocimiento se presenta mediante reglas de la forma IF- THEN, el comportamiento real del sistema se define en las reglas individuales. Para crear el prototipo de un conjunto apropiado de reglas, se comienza por crear reglas que representen estrategias de controlador inequívocas en puntos de operación específicos. Una vez que se han establecido estas, se puede proceder a la construcción del conjunto de reglas, en la Tabla 2 presentamos las cuatro reglas que se establecieron como suficientes para determinar el comportamiento deseado del sistema, esta se realizó mediante la asignación directa de comportamiento para los actuadores que se determinó con la ayuda del experto.
| Tabla 2. Reglas de producción. | ||||||||||||||
| DESP_REL | A_VISUAL | A_ACUSTICO | A_MENSAJE | |||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ESTABLE | AVVERDE | APAGA | APAGA | |||||||||||
| REGULAR | AVAMARILLO | APAGA | AMPRECAUCION | |||||||||||
| LIMITE | AVAMARILLO | APAGA | AMALERTA | |||||||||||
| PELIGRO | AVROJO | ALERTA | AMALERTA | |||||||||||
Cuarta etapa. En esta etapa obtenemos el valor exacto de la salida. Entonces solo necesitamos transformar los valores de membresía que entrega el motor de inferencia, en un valor real para fines prácticos a partir de los consecuentes de las reglas que se hayan activado, es necesario obtener una única acción de control, combinando el resultado propuesto por cada una de ellas.
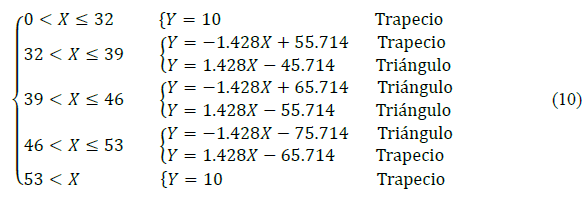
Una verificación del sistema diseñado se inicia invocando un modo de depuración del software fuzzyTECH. Todos los cambios realizados en el controlador se implementan inmediatamente en la tarea del controlador depurado actual, esto permite la prueba de los cambios ingresados en el controlador debido a datos de entrada específicos, esto es, verificar el comportamiento del sistema con datos ingresados manualmente. Se recorre por completo el rango de 0 cm a 70 cm, en la Figura 3 se observa el caso cuando se alimenta la entrada con un valor de 37cm que es alimentado manualmente y el valor que correspondería a las salidas.
 |
||||
| Figura 3. Depuración del Sistema diseñado (entrada de 37cm). | ||||
2.3 Algoritmo propuesto
Proponemos entonces proceder de la siguiente manera:
Inicio Declaración del tipo de dato inferencia (estable, regular, limite, peligro) Proceso PERTENENCIA Convierte distancia (BCD) a dis (integer); Evalua dis Asigna PendienteNegativa y PendientePositiva Asigna PerteneceNegativa y PertenecePositiva Fin Evalua Fin PERTENENCIA Proceso RAZON Declaración de variables del proceso mientras PendienteNegativa < PendientePositiva resultado = PendientePositiva y pertenece = PertenecePositivo Si no resultado = PendienteNegativa y pertenece = PerteneceNegativa Fin Mientras Fin RAZON Proceso SALIDA Si flanco de subida Evalua Pertenece Asigna valores a las salidas Fin Evalua Fin SALIDA
Algoritmo SBR para SSDRUP.
2.4 Implementación
Una vez depurado, verificado y optimizado el sistema podemos programar los módulos necesarios para implementar el Sistema Basado en Reglas para el Sistema Sensor de Desplazamiento Relativo por Ultrasonido en Péndulo (SBR para SSDRUP).
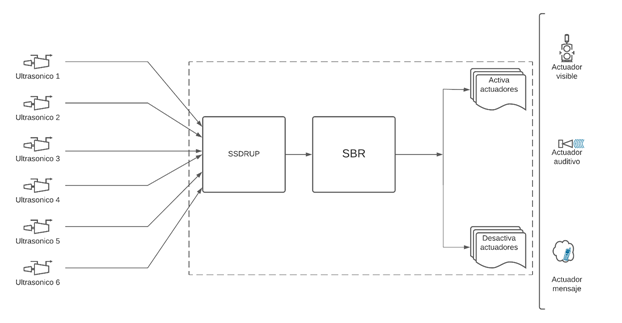
Entonces SBR para SSDRUP embebe el motor de inferencia que se encarga de realizar la evaluación de todas las medidas recolectadas por los sensores, determina la mayor de las medidas, evalúa y establece el estado de salud estructural que se determina con las reglas de inferencia, y genera los niveles de lógicos de las salidas del sistema para activar o no el funcionamiento de los actuadores previstos. Finalmente, en la Figura 4 se muestra el sistema SBR para SSDRUP completo.
 |
||||
| Figura 4. Esquema general del sistema. | ||||
3. Materiales y métodos
Se empleo un modelo construido de madera con los vértices flexibles para permitir generar las inclinaciones de manera manual e independiente para cada nivel. Instrumentado con un sistema de seis sensores de ultrasonidos HC-SR04 uno en cada nivel suspendido a 45cm del techo del entrepiso y a una distancia de 50cm del muro límite ubicado en la entrada de la fuerza lateral, la finalidad de suspender el sensor en el techo del nivel a analizar es generar un efecto péndulo cuando se produce la inclinación (ver Figura 5). El sistema solo requiere de una simple calibración con el eje vertical de referencia. El sensor no sufrió rotaciones durante la medición, la aproximación de péndulo es para oscilaciones pequeñas, el ángulo subtendido entre el emisor ultrasónico, el punto de contacto en la estructura y el receptor del eco es prácticamente cero. El sensor conservó en todo momento la vertical durante la medición, de tal forma que la estructura es la que se mantuvo oscilando no obstante en el uso del péndulo puede haber cambios de fase que alteren la medición.
 |
||||
| Figura 5. Instrumentación del modelo con sensores HC-SR04. | ||||
Para la fase del modelado y verificación se contó con el apoyo del Ing. Civil Jesús Carrillo Sánchez de la UNAM y se empleó el software fuzzyTECH 6.03 IA-S7 el cual permite la definición gráfica de las funciones de pertenencia de cada término empleado y la depuración del sistema diseñado.
El sistema diseñado se implementó utilizando metodología para el diseño jerárquico e integración de entidades de la lógica programable y su programación en el lenguaje de descripción de hardware VHDL en la plataforma Intel Quartus II V.13.0.1 Web Edition. SBR para SSDRUP se embebió en una FPGA EP2C5T144C8 (ver Figura 6) y el acondicionamiento de las señales de salida hacia los actuadores cuenta con indicadores visuales de los niveles lógicos presentes.
 |
||||
| Figura 6. SBR para SSDRUP embebido en la FPGA EP2C5T144C8. | ||||
4. Experimentos y resultados
Para validar el sistema implementado se instrumentó el modelo descrito y se diseñó un set de pruebas donde en cada experimento se manipula de manera independiente cada uno de los seis niveles del modelo empleado de manera que se generan diferentes inclinaciones en cada uno de ellos, SSDRUP obtiene las medidas de desplazamiento relativo de cada entrepiso y determina la mayor de esas medidas la cual SBR para SSDRUP ingresa para la evaluación.
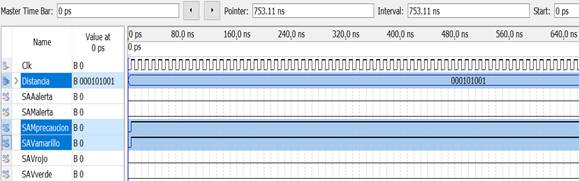
Prueba 1. SSDRUP determinó 21cm como la mayor de las seis mediciones con lo que SBR para SSDRUP asigna la pertenencia de la variable de entrada al valor lingüístico ESTABLE y establece los niveles lógicos para las salidas de los actuadores como lo podemos verificar en la Figura 7.
 |
||||
| Figura 7. Diagrama de tiempos de la Prueba 1. | ||||
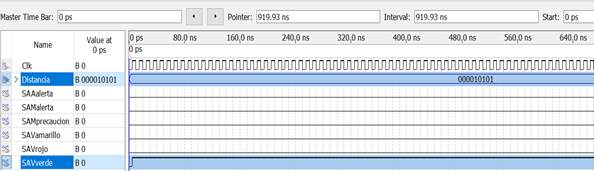
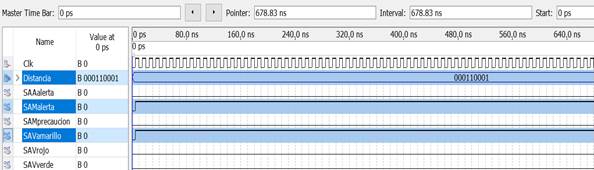
Prueba 2. SSDRUP determinó 37cm como la mayor de las seis mediciones con lo que SBR para SSDRUP asigna la pertenencia de la variable de entrada al valor lingüístico REGULAR, y establece los niveles lógicos para las salidas de los actuadores como lo podemos verificar en la Figura 8.
 |
||||
| Figura 8. Diagrama de tiempos de la Prueba 2. | ||||
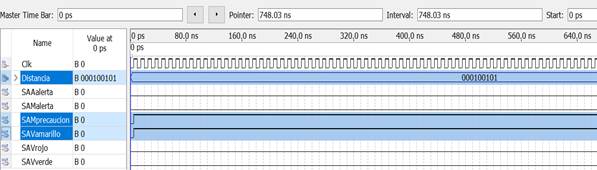
Prueba 3. SSDRUP determinó 41cm como la mayor de las seis mediciones con lo que SBR para SSDRUP asigna la pertenencia de la variable de entrada al valor lingüístico REGULAR y establece los niveles lógicos para las salidas de los actuadores como lo podemos verificar en la Figura 9.
 |
||||
| Figura 9. Diagrama de tiempos Prueba 3. | ||||
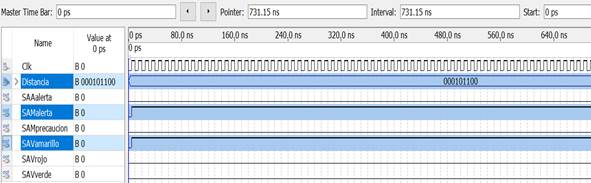
Prueba 4. SSDRUP determinó 44cm como la mayor de las seis mediciones con lo que SBR para SSDRUP asigna la pertenencia de la variable de entrada al valor lingüístico LIMITE y establece los niveles lógicos para las salidas de los actuadores como lo podemos verificar en la Figura 10.
 |
||||
| Figura 10. Diagrama de tiempos Prueba 4. | ||||
Prueba 5. SSDRUP determinó 49cm como la mayor de las seis mediciones con lo que SBR para SSDRUP asigna la pertenencia de la variable de entrada al valor lingüístico LIMITE y establece los niveles lógicos para las salidas de los actuadores como lo podemos verificar en la Figura 11.
 |
||||
| Figura 11. Diagrama de tiempos Prueba 5. | ||||
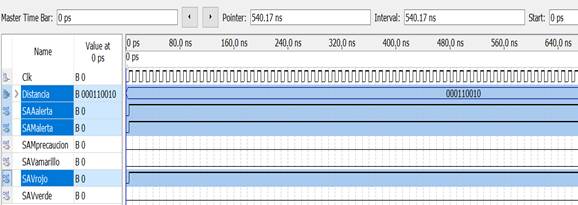
Prueba 6. SSDRUP determinó 50cm como la mayor de las seis mediciones con lo que SBR para SSDRUP asigna la pertenencia de la variable de entrada al valor lingüístico PELIGRO y establece los niveles lógicos para las salidas de los actuadores como lo podemos verificar en la Figura 12.
 |
||||
| Figura 12. Diagrama de tiempos Prueba 6. | ||||
Los valores lógicos presentes en las salidas hacia los actuadores se verifican físicamente en los indicadores visuales de las salidas acondicionadas y se reportan en la Tabla 3:
| Tabla 3. Valores lógicos presentes en las salidas hacia los actuadores. | ||||||||||||||
| Prueba | Δ(cm) | Pertenece | SAAalerta | SAV verde | SAV amarillo | SAV rojo | SAM precaucion | SAM alerta | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 21 | ESTABLE | 0 | 1 | 0 | 0 | 0 | 0 | ||||||
| 2 | 37 | REGULAR | 0 | 0 | 1 | 0 | 1 | 0 | ||||||
| 3 | 41 | REGULAR | 0 | 0 | 1 | 0 | 1 | 0 | ||||||
| 4 | 44 | LIMITE | 0 | 0 | 1 | 0 | 0 | 1 | ||||||
| 5 | 49 | LIMITE | 0 | 0 | 1 | 0 | 0 | 1 | ||||||
| 6 | 50 | PELIGRO | 1 | 0 | 0 | 1 | 0 | 1 | ||||||
Prueba 1: El sistema determina que la medida de 21cm de desplazamiento relativo pertenece a una categoría determinada como ESTABLE por lo que activa la salida hacia el actuador visual color verde y mantiene apagados los demás actuadores con lo que se indicaría que la estructura es estable y sin riesgo de desplome. Pruebas 2 y 3: Con medidas de 37cm y 41cm respectivamente el sistema determina estatus REGULAR encendiendo los actuadores visual color amarillo y mensaje precaución, y apagados los demás actuadores con lo que se alerta precautoriamente de manera visual y por mensaje ya que la estructura se encuentra en una situación comprometida. Pruebas 4 y 5: Se observa que las medidas de 44cm y 49cm respectivamente el sistema determina estatus LIMITE y activa en esos casos los actuadores correspondientes a alertar tal situación: encendido actuador visual color amarillo, encendido actuador mensaje alerta y apagados los demás actuadores con lo que alerta visualmente y por mensaje que la estructura se encuentra comprometida y en riesgo de desplome. Prueba 6: Se observa que la medida de 50cm el sistema determina el estatus LIMITE y activa los tres actuadores correspondientes a alertar tal situación: encendido actuador acústico, encendido actuador visual color rojo, encendido actuador mensaje alerta y apagados los demás actuadores con lo que alerta visualmente que la estructura está seriamente comprometida y en riesgo de desplome.
El estado límite inferior calculado en (4) es de 42cm con lo que se esperaría que una medida de desplazamiento relativo superior a esta activará las alertas y una medida inferior no las activaría, en la Prueba 2 con una medida de 37cm se activan las alertas de precaución con lo que se verifica que el sistema no espera a límite inferior para reaccionar. Así mismo para el estado límite superior calculado en (5) es de 52.5cm por lo que se esperaría que a partir de esta medida de desplazamiento relativo de entrepiso la estabilidad de la estructura estaría seriamente comprometida, en los resultados de la Prueba 6 se observa que con una medida de 50cm, esto es, una medida inferior a la del límite superior el sistema la ubica un estatus de PELIGRO y activa los tres actuadores correspondientes a alertar tal situación, esto valida que el sistema reacciona de una manera dosificada y no responde solo a máximos y mínimos de acuerdo al diseño realizado.
5. DiscusiÓn de resultados
El monitoreo de salud estructural utiliza principalmente sensores de desplazamiento láser y acelerómetros lo cual representa para su manejo un elevado costo y una alta complejidad técnica además de requerir por lo general puntos fijos para realizar dicha medida.
Li y Hao, (2016) reportan el desarrollo de un sensor de desplazamiento relativo que utiliza el principio de un circuito de puente de Wheatstone y determinan un índice de daño, con la limitante que el sensor mide el movimiento relativo local y solo es sensible a los cambios de condición localmente.
En Park et al. (2013) emplean un sensor de desplazamiento láser y un nodo sensor inalámbrico personalizado que mide el desplazamiento como un índice de daño con el cual implementan SHM para verificar y corregir los parámetros de diseño de una edificación irregular. Este método implica utilizar la técnica óptica LDS para obtener la distancia del objetivo por triangulación con su complejidad inherente.
Nuestra propuesta basada en un sistema sensor de desplazamiento relativo ultrasónico en péndulo (SSDRUP) es capaz de proporcionar la medida del desplazamiento relativo del entrepiso mediante la toma de una sola medida, y tan solo requiere que los sensores sean colocados apuntando al elemento estructural vertical del lado de la fuerza horizontal entrante que se identifica y la recolección de la medida se realizará aprovechando el efecto péndulo que se propicia. Nos ajustamos a lo determinado por Paulay, (2001) que indica que para evaluar debemos considerar que las magnitudes de desplazamiento medio entre plantas de los últimos entre pisos no deben exceder del 2 al 2.5% de la altura del entrepiso y con esto establecemos el límite de la medida del desplazamiento relativo y proporcionar nuestro propio índice de daño para el SHM.
En las tres propuestas se desarrollaron diferentes sensores de desplazamiento relativo y se propuso un índice de daño particular para cada caso, por lo que no es posible establecer una comparación de eficiencia.
6. Conclusiones
La propuesta de ubicación de los sensores y el efecto péndulo provocado por su colocación suspendida fue acertada, ya que las proyecciones geométricas generadas una vez analizadas hicieron posible que a través de la recolección de una única medida para cada sensor suspendido y que al efecto de la fuerza lateral que ingresa a la estructura esta medida disminuye y mediante la relación de similitudes que se puede aplicar, como es el caso, a triángulos semejantes y se pudo obtener mediante los mecanismos matemáticos correspondientes la medida del desplazamiento relativo del entrepiso. El sistema solo requiere de una simple calibración con el eje vertical de referencia.
La aplicación del diseño jerárquico de la lógica programable con programación VHDL permitió diseñar un dispositivo electrónico capaz de obtener medidas recolectadas por la red de sensores para ser procesadas por el algoritmo de SSDRUP para entregar medidas de desplazamiento relativo de entrepiso, así como identificar la de mayor magnitud con la cual el algoritmo SBR para SSDRUP realiza la evaluación para determinar la estabilidad de la estructura mediante el índice propuesto presentado en este trabajo.
La instrumentación con SBR para SSDRUP del modelo empleado en esta investigación proporciono la información necesaria para la evaluación. En el apartado de resultados se puede verificar como el sistema fue capaz de determinar en cada caso salidas hacia los actuadores y que el 100% de las pruebas implementadas correspondieron con exactitud al diseño establecido y definidas las acciones por el experto. Con lo que podemos concluir que el sistema SBR para SSDRUP es capaz de determinar la estabilidad de una estructura modelo de manera no invasiva, en tiempo real, sin la necesidad de requerir puntos fijos para la recolección de datos y en base a un parámetro: desplazamiento relativo de entrepiso, por lo que se puede recomendar como herramienta de apoyo para su utilización en SHM para estimar el daño en edificios de varios niveles.
7. Agradecimientos
Los autores agradecen al Centro de Investigación Multidisciplinario Aragón-FES Aragón, UNAM, México, por su apoyo brindado para desarrollar este proyecto. F. Ramírez agradece la beca doctoral del Conacyt.
Referencias
Arias, D., De la Colina, J. (2018), Assessment of methodologies to estimate displacements from measured acceleration records. Measurement. 114:261-273. https://doi.org/10.1016/j.measurement.2017.09.019
Bao, X., Chen, L. (2012), Recent progress in distributed fiber optic sensors. Sensors. 12(7):8601-8639. https://doi.org/10.3390/s120708601
Breuer, P., Chmielewski, T., Górski, P., Konopka, E. (2002), Application of GPS technology to measurements of displacements of high-rise structures due to weak winds. Journal of Wind Engineering and Industrial Aerodynamics. 90(3):223-230. https://doi.org/10.1016/S0167-6105(01)00221-5
Chatterjee, S., Sarbartha, S., Sirshendu, H., Nilanjan, D., Amira, S., Valentina, E. (2017), Particle swarm optimization trained neural network for structural failure prediction of multistoried RC buildings. Neural Computing and Applications. 28:2005-2016. https://doi.org/10.1007/s00521-016-2190-2
Ghasemi, M. R., Nobahari, M., Shabakhty, N. (2018), Enhanced optimization-based structural damage detection method using modal strain energy and modal frequencies. Engineering with Computers. 34:637-647. https://doi.org/10.1007/s00366-017-0563-5
Guo, J., Xie, X., Bie, R., Sun, L. (2014), Structural health monitoring by using a sparse coding-based deep learning algorithm with wireless sensor networks. Personal and Ubiquitous Computing. 18:1977-1987. https://doi.org/10.1007/s00779-014-0800-5
Li, J., Hao, H. (2016), Health monitoring of joint conditions in steel truss bridges with relative displacement sensors. Measurement. 88:360-371. https://doi.org/10.1016/j.measurement.2015.12.009
Li, X. Q., Chen, Q. J., Ding, Z. D. (2019), Structural damage diagnosis and fine scale finite element intelligence simulation of long span cable stayed bridges. Cluster Computing. 22: 4101-4107. https://doi.org/10.1007/s10586-017-1515-y
Maxinez, D., Alcalá, J. (2007), VHDL El arte de programar sistemas digitales. México, CECSA, 5th. ed., cap 1, pp. 1-31.
Moosazade, S., Namazi, E., Aghababael, H., Marto, A., Mohamad, H., Hajihassani, M. (2019), Prediction of building damage induced by tunnelling through an optimized artificial neural network. Engineering with Computers. 35(2):579-591. https://doi.org/10.1007/s00366-018-0615-5
Park, H. S., Kim, J. M., Choi, S. W., Kim, Y. (2013), A Wireless Laser Displacement Sensor Node for Structural Health Monitoring. Sensors. 13(10):13204-13216. https://doi.org/10.3390/s131013204
Paulay, T., (2001) Some design principles relevant to torsional phenomena in ductile buildings. Journal of Earthquake Engineering. 5(3):273-308. https://doi.org/10.1080/13632460109350395
Song, H. X., Wang, X. D., Ma, L. Q., Cai, M. Z., Cao, T. Z. (2006), Design and performance analysis of laser displacement sensor based on Position Sensitive Detector (PSD). Journal of Physics: Conference Series. 48:217-222. http://dx.doi.org/10.1088/1742-6596/48/1/040
Tamura, Y., Matsui, M., Pagnini, L. C., Ishibashi, R., Yoshida, A. (2002), Measurement of wind-induced response of buildings using RTK-GPS. Journal of Wind Engineering and Industrial Aerodynamics. 90:1783-1793. https://doi.org/10.1016/S0167-6105(02)00287-8
Zrelli, A., Ezzedine, T. (2017), Collect Tree Protocol for SHM system using wireless sensor networks. 13th International Wireless Communications and Mobile Computing Conference (IWCMC):1797-1801. https://doi.org/10.1109/IWCMC.2017.7986556