
| Investigación Aplicada | https://doi.org/10.21041/ra.v11i1.521 |
Mapping of pathological manifestations in asphalt pavement through the use of drones
Mapeamento de manifestações patológicas em pavimento asfáltico por meio de uso de drones
Mapeo de manifestaciones patológicas en pavimento asfáltico por medio del uso de drones
R. T.
Vasconcelos Fernandes1, A. Fonseca Cabral1, G. C. Batista Dantas1
*
![]() ,
V. N.
Varela Tinoco1, B. D. Azevedo da Silveira1, A. M. Sousa1
,
V. N.
Varela Tinoco1, B. D. Azevedo da Silveira1, A. M. Sousa1
1 Universidade Federal Rural do Semi-Árido, Rua Francisco Mota Bairro, 572 - Pres. Costa e Silva, Mossoró - RN, 59625-900, Brasil.
*Contact author: gerbeson_dantas@hotmail.com
Recepción: 30 de octubre de 2020.
Aceptación: 16 de diciembre de 2020.
Publicación: 01 de enero de 2021
| Citar como: Vasconcelos Fernandes, R. T., Fonseca Cabral, A., Batista Dantas, G. C., Varela Tinoco, V. N., Azevedo da Silveira, B. D., Sousa Junior, A. M. (2021), "Mapeo de manifestaciones patológicas en pavimento asfáltico por medio del uso de drones", Revista ALCONPAT, 11 (1), pp. 61 – 72, DOI: https://doi.org/10.21041/ra.v11i1.521 |
Abstract
This work objective is to study the feasibility of the Drones’ use for mapping and inspecting pathological manifestations in asphalt pavements compared to the traditional method. Sampling plots were established every 20 m, with 6 m extension, making a total of 20 stations, which had their pathological manifestations recorded and calculated with the Global Severity Index for the study area. The results obtained by the reference and alternative methodologies were confronted according to the pathologies identified and the time spent in the surveys. The results showed feasibility in the use of drones for inspection of pathologies in asphalt pavements, based on DNIT 006/2003 - PRO, obtaining results similar to those of the traditional methodology with a significant reduction of the time of operation (33.3%).
Palabras clave:
inspección de carreteras,
defectos en pavimentos flexibles,
DNIT 006/2003,
metodología alternativa,
aviones no tripulados.
Resumo
Este trabalho objetiva estudar a viabilidade do emprego de Drones para mapeamento e inspeção de manifestações patológicas em pavimentos asfálticos comparando ao método tradicional. Foram estabelecidas parcelas amostrais a cada 20 m, com 6 m de extensão, totalizando 20 estações, as quais tiveram suas manifestações patológicas anotadas e calculado o Índice Global de Gravidade para a área de estudo. Os resultados obtidos pelas metodologias de referência e alternativa foram confrontados em função das patologias identificadas e do tempo gasto nos levantamentos. Os resultados demonstraram viabilidade para emprego de Drones para inspeção de patologias em pavimentos asfálticos, tomando como base a Norma DNIT 006/2003 - PRO, obtendo resultados similares à metodologia tradicional com redução significativa do tempo de operação (33,3%).
Keywords:
road inspection,
defects in flexible pavements,
DNIT 006/2003,
alternative methodology,
drones.
Resumen
El objetivo de este trabajo es estudiar la viabilidad del empleo de Drones para mapear e inspeccionar manifestaciones patológicas en pavimentos asfálticos en comparación con el método tradicional. Se establecieron parcelas muestrales cada 20 m, con 6 m de extensión, totalizando 20 estaciones, las cuales tuvieron sus manifestaciones patológicas anotadas y calculado el Índice Global de Gravedad para el área de estudio. Los resultados obtenidos con las metodologías de referencia y alternativa se confrontaron en función de las patologías identificadas y el tiempo empleado en los levantamientos. Los resultados demostraron viabilidad para el empleo de Drones en la inspección de patologías de pavimentos asfálticos, tomando como base la Norma DNIT 006/2003 - PRO, obteniendo resultados similares a la metodología tradicional con reducción significativa del tiempo de operación (33,3%).
Palavras-chave:
inspeção rodoviária,
defeitos em pavimentos flexíveis,
DNIT 006/2003,
metodologia alternativa,
drones.
1. IntroducciÓn
El transporte por carretera es un servicio fundamental para el desarrollo económico de Brasil, incidiendo directamente en aspectos de producción y consumo, ya que el país tiene su infraestructura orientada al modal vial (Andrade; Maia; Lima Neto, 2015). Sin embargo, este modal representa el 61% del transporte de carga en Brasil y es el principal sistema de desplazamiento de pasajeros. En cuanto a los aspectos sociales y económicos, este sector es responsable de la generación de más de 1,5 millones de empleos directos y aporta a nivel nacional el 12,7% del Producto Interno Bruto de los servicios no financieros (CNT, 2017).
A pesar de su importancia, históricamente se ha prestado poca atención al mantenimiento de la infraestructura de las carreteras brasileñas, lo que se refleja en la depreciación de la red vial, situación que se ha agudizado con la crisis económica que atraviesa el país desde 2013 (CNT, 2017). Como consecuencia de la falta de inversiones, se estima que más del 50% de las carreteras presentan algún tipo de patología, y de estas, el 19% se encuentran en un estado general de mala o muy mala conservación. Según el Foro Económico Mundial (FEM), Brasil ocupa el puesto 111 entre 138 países evaluados en términos de calidad de infraestructura vial (CNT, 2017; FEM, 2016).
Entre las principales razones del deterioro de la red vial brasileña, el Departamento Nacional de Infraestructura de Transporte (DNIT, 2011) atribuye la ausencia de un Sistema de Gestión de Pavimentos (SGP), que permitiría lograr la mejor aplicación posible de los recursos públicos. disponibles y ofrecer transporte por carretera seguro, compatible y económico con la creciente demanda brasileña. Sin esto, existe la adopción de diseños inadecuados para los caminos, elaborados sin relevamiento detallado del pavimento o la situación en la que se encuentra el terreno (Viera, et al 2016). La base de un SGP eficiente es la adopción de métodos adecuados para evaluar los pavimentos, a través de los cuales es posible verificar la necesidad de mantenimiento o reconstrucción de la carretera, así como determinar si se construyó de acuerdo con las especificaciones del proyecto (Haas; Hudson, 1978; Viera, et al 2016).
La valoración superficial de los pavimentos se suele realizar siguiendo la norma DNIT 006/2003 - PRO, que utiliza el método Global Gravity Index (IGG). Este método permite analizar objetivamente el nivel de deterioro de un piso según la incidencia de defectos superficiales, indicando sus condiciones de conservación y ayudando a tomar decisiones sobre las intervenciones necesarias. Si bien el IGG se considera un método eficaz y está muy extendido en el entorno técnico, presenta como desventaja la necesidad de realizar levantamientos a pie, lo que hace que su aplicación sea lenta y costosa para su aplicación en grandes áreas.
Una alternativa para solucionar este problema es el uso de los denominados vehículos aéreos no tripulados (UAV), que pueden volar automáticamente o ser piloteados por medios electrónicos y computacionales. Este equipo fue diseñado para fines militares, inicialmente utilizado en misiones que son demasiado peligrosas para ser realizadas por seres humanos (Resende, 2015). Sin embargo, en los últimos años ha ido ganando protagonismo entre las intervenciones civiles, configurando una tecnología emergente en la ingeniería civil con aplicaciones que van desde la inspección de obras, hasta la inspección de estructuras en entornos de alto riesgo (Melo, 2016).
Con respecto a la aplicación de vehículos aéreos no tripulados en la infraestructura de transporte, sus sensores integrados son una fuente de información nueva y económica e incluso pueden ayudar en los esfuerzos para mantener la carretera (Branco, 2016; Nishar et al., 2016). A pesar de esto, se han realizado pocos estudios con esta tecnología, especialmente como herramienta para evaluar los daños viales.
Así, considerando la necesidad de optimizar el proceso de evaluación vial en apoyo al SGP y el potencial que ofrecen los UAV, es fundamental desarrollar metodologías que permitan su uso de manera eficiente y técnicamente adecuada (Breen et al., 2015; Nishar et al., 2016). Para ello, este trabajo tiene como objetivo estudiar la viabilidad del uso de Drones para el mapeo e inspección de patologías en pavimentos asfálticos, comparando y comparando sus resultados con el método de análisis tradicional.
2. Material y mÉtodos
2.1 Área de estudio
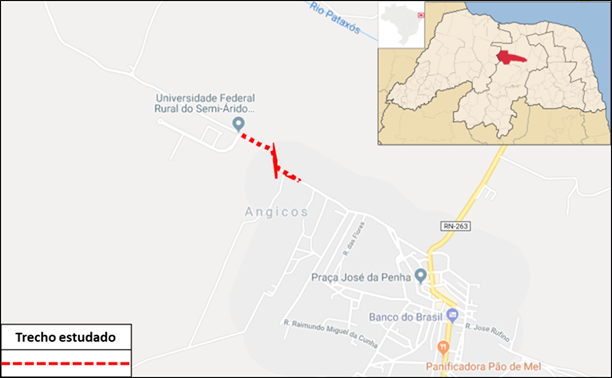
Como unidad muestral del presente estudio, un tramo de asfalto de una sola vía de aproximadamente 0,5 km de longitud, que da acceso al campus de la Universidad Federal Rural del Semiárido / UFERSA, en el municipio de Angicos, estado de Río Grande. do Norte - Brasil (Figura 1). Este tramo, aunque de pequeña extensión, resultó idóneo para la realización del estudio debido al gran número de manifestaciones patológicas en el pavimento.
 |
||||
| Figura 1. Área de estudio (Lat. 5°39'17.32"S; Lon. 36°36'37.48"O). | ||||
2.2 Levantamiento das patologías pelo método tradicional (referencia)
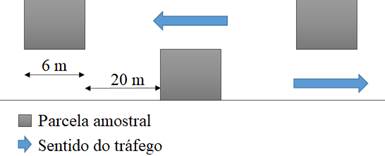
Para relevar las patologías existentes en el área de estudio se establecieron parcelas de muestreo cada 20 m (en manos alternas), cada 6 m de largo, según establece la Norma DNIT 006/2003 - PRO (Figura 2). En total, se consideraron 20 estaciones, en las que se anotaron sus defectos, teniendo en cuenta la sección del terreno y los tipos de manifestación patológica, distinguiendo entre grietas, sumideros plásticos o consolidados, ondulaciones, sartenes, exudaciones, desgaste, parches y huellas de ruedas. También se realizaron registros fotográficos de todo tipo de defectos encontrados en la sección en estudio.
 |
||||
| Figura 2. Esquema de distribución de las parcelas muestrales establecidas en el área de estudio. | ||||
2.3 Estudio de las patologías con Drone (alternativa)
Para adquirir las imágenes del área de estudio se utilizó un Vehículo Aéreo No Tripulado - UAV, del fabricante DJI modelo Phantom 4 PRO (Figura 3). El referido UAV es un tipo multirotor que pesa aproximadamente 1,5 kg y está equipado con una cámara de 20 megapíxeles (capaz de filmar a 4 k / 60 fps), con un alcance de transmisión de video de 7 km. La elección del equipo se basó en su facilidad de uso, estabilidad de vuelo, calidad de las imágenes generadas y precio asequible.
 |
||||
| Figura 3. VANT DJI modelo Phantom 4 PRO utilizado en el estudio | ||||
Para las etapas de planificación del vuelo y posterior composición de la ortografía se utilizó la aplicación Drone Deploy. Permite parametrizar el plan de vuelo de acuerdo con la resolución deseada para las imágenes originales, la tasa de superposición de imágenes, las líneas de vuelo y la resolución resultante. Los parámetros de vuelo utilizados en el presente estudio se pueden ver en la Tabla 1. La ortografía fue generada automáticamente por la aplicación y exportada para su posterior análisis (Figura 4).
| Tabla 1. Parámetros de vuelo utilizados en la encuesta | ||||||||||||||
| PARÁMETRO | VALOR | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Altitud | 70 m | |||||||||||||
| Resolución | 2,4 cm/píxel | |||||||||||||
| Tasa de cobertura horizontal | 65% | |||||||||||||
| Tasa de cobertura vertical | 75% | |||||||||||||
| Velocidad de vuelo | 15 m/s | |||||||||||||
| Tiempo de vuelo | 6 minutos | |||||||||||||
| Número de fotos | 109 | |||||||||||||
 |
||||
| Figura 4. Ortoimagen del área de estudio generada por la aplicación Drone Deploy. | ||||
2.4 Cálculo del índice de gravedad global - IGG
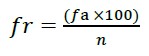
Luego de mapear las patologías, se calculó el Índice de Severidad Global (IGG) para el área de estudio, siguiendo las recomendaciones del DNIT 006/2003 - PRO. Inicialmente se estimó la frecuencia absoluta (fa) de ocurrencia de cada tipo de manifestación patológica, correspondiente al número de veces que se verificó la ocurrencia. Luego, se obtuvo la frecuencia relativa (fr) para cada patología, a través de la Ecuación 1. Para cada tipo de patología se calculó el Índice de Severidad Individual - IGI (Ecuación 2), que luego se sumaron, dando como resultado el IGG (Ecuación 3).
 |
(1) |
Siendo,
fa - frecuencia absoluta
n - número de inspecciones realizadas (número de parcelas de muestra).
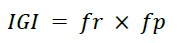 |
(2) |
Siendo,
fr - frecuencia relativa
fp - factor de ponderación (según la tabla DNIT)
 |
(3) |
Se compararon los resultados obtenidos por las metodologías de referencia y alternativas según el número y tipo de patologías identificadas, así como el tiempo dedicado a la realización de las encuestas. Finalmente, los IGG obtenidos se compararon con la Norma DNIT 006/2003 - PRO, con el fin de determinar el concepto de degradación del tramo analizado (Cuadro 2).
| Tabla 2. Concepto de degradación del pavimento por IGG. | ||||||||||||||
| Conceptos | Limites | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Excelente | 0 < IGG ≤ 20 | |||||||||||||
| Bueno | 20 < IGG ≤ 40 | |||||||||||||
| Regular | 40 < IGG ≤ 80 | |||||||||||||
| Malo | 80 < IGG ≤ 160 | |||||||||||||
| Terrible | IGG > 160 | |||||||||||||
| Fuente: NORMA DNIT 006/2003 - PRO | ||||||||||||||
3. Resultados y discusión
3.1 Análisis comparativo: inspección con drones frente a inspección tradicional
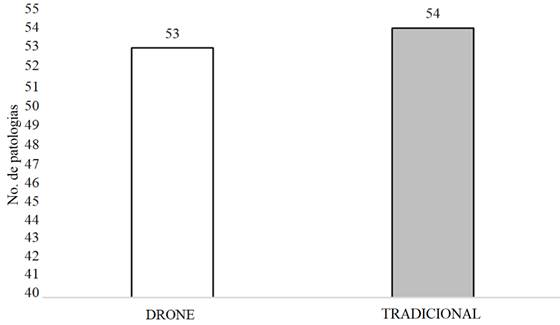
El apartado analizado presentó un gran número de patologías en ambos métodos empleados. La cuantificación total de patologías, sumando las 20 parcelas evaluadas, arrojó valores muy cercanos para ambos métodos, siendo 54 para la inspección tradicional y 53 para la inspección con el Drone, lo que demuestra la viabilidad de utilizar el Drone para cuantificar patologías sobre pavimentos (Figura 5).
 |
||||
| Figura 5. Patologías totales identificadas según el método de inspección. | ||||
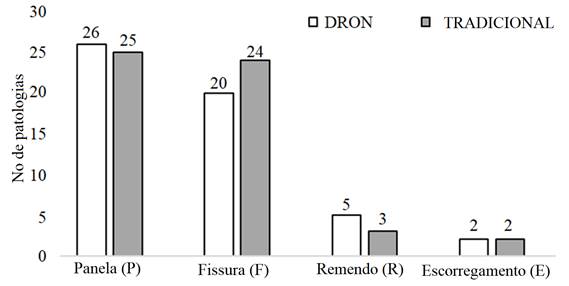
En cuanto al aspecto cualitativo, la inspección realizada con el Drone permitió identificar 04 tipos de patologías, que son: macetas (P) - hueco o agujero que se forma en el revestimiento y puede llegar a la base; grietas (F): caracterizadas como aberturas en la superficie del asfalto que son visibles a simple vista; parches (R) - defecto caracterizado por el llenado de macetas o cualquier otro orificio, agujero o depresión con mezcla asfáltica; y deslizamiento (E) - desplazamiento en relación con la capa de pavimento. En cuanto a los tipos de patologías, no hubo diferencia entre el método de inspección tradicional y el método de inspección Drone. En cuanto al número de defectos por tipo de patología, hubo pequeñas diferencias entre los métodos utilizados, como se muestra en la figura 6.
 |
||||
| Figura 6. Patologías totales identificadas según el tipo y método de inspección. | ||||
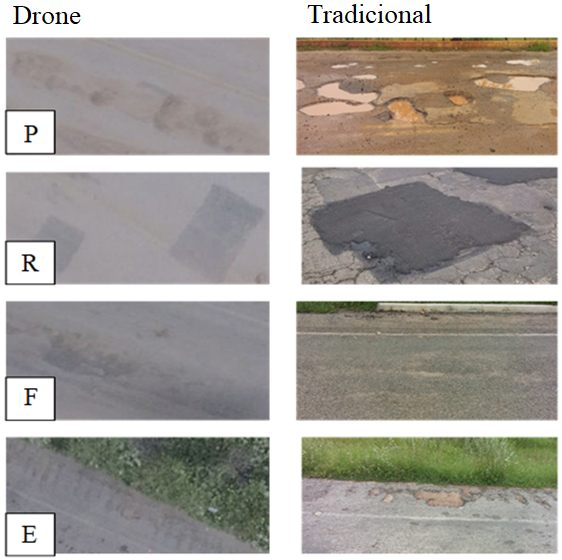
Cabe señalar que la causa más probable de estas diferencias se debe a que algunos tipos de patologías pueden ser difíciles de identificar debido al uso de imágenes obtenidas por los UAV debido a su calidad, mientras que la inspección tradicional puede resolver cualquier duda sobre la aparición de una patología porque se trata de un análisis in situ. Como ejemplo, se pueden comparar macetas y grietas. En el primer caso, es más fácil de identificar por la propia naturaleza de la patología, que en general destaca sobre el resto del pavimento. En el segundo, es mucho más difícil de identificar, a veces necesita confirmación a través de una inspección in situ. En la Figura 7 es posible comprar las imágenes obtenidas con el Drone y utilizando el método tradicional, para cada uno de los tipos de patologías identificadas.
 |
||||
| Figura 7. Patologías totales identificadas según el tipo y método de inspección. | ||||
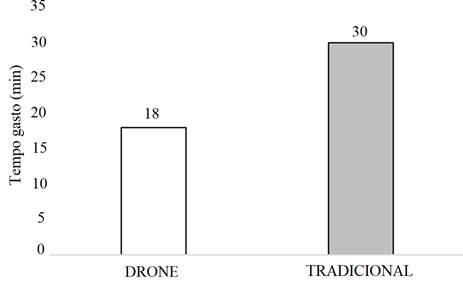
Con respecto al tiempo dedicado a la inspección, se encontró que el análisis realizado con el Drone (6 minutos de vuelo y 12 minutos para evaluación de imagen) tomó menos de 1/3 del tiempo dedicado a realizar la inspección tradicional (Figura 8). Considerando que en el presente estudio se evaluó un pequeño tramo de 0,5 km, se asume que en tramos más largos de grandes carreteras esta diferencia es aún mayor, haciendo cada vez más atractivo el uso del Drone.
 |
||||
| Figura 8. Tiempo empleado en realizar la inspección según la metodología utilizada. | ||||
3.2 Análisis comparativo: Drone x Inspección tradicional
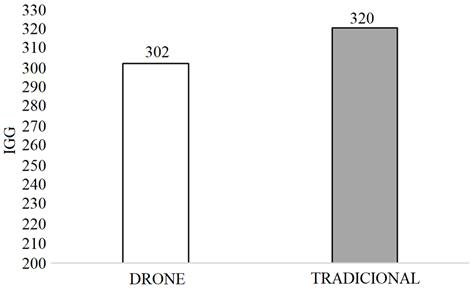
El valor obtenido para el Índice de Severidad Global - IGG, fue 302 para la inspección realizada con el Drone y 320 para el método tradicional (Figura 9), y en ambos casos, según DNIT 006/2003 - PRO , el tramo evaluado se consideró terrible (IGG> 160). Uno de los puntos que más influye en este resultado es la presencia de una gran cantidad de Pans (P), que se encontró en todas las parcelas estudiadas, que es la patología que más impacta el tráfico y contribuye a la aceleración por degradación del pavimento. Aunque se han obtenido diferentes valores, se observa que la diferencia existente no es significativa, demostrando que la inspección con la ayuda de Drones es técnicamente factible.
 |
||||
| Figura 9. Índice de Severidad Global - IGG según la metodología utilizada. | ||||
3.3 Análisis general de la metodología propuesta
La metodología de uso de UAV para inspección de pavimentos ya se puede observar en trabajos como Parente, Felix y Picanço (2017), donde, como en el presente trabajo, se utilizó esta herramienta en comparación con la metodología estándar actual. La adición de una evaluación comparativa entre el método propuesto y el método tradicional es esencial para la cuantificación estadística de la efectividad de cualquier metodología alternativa propuesta. Por tanto, otro resultado señalado por este trabajo es una metodología de comparación para el uso de UAV en inspecciones de estructuras de cualquier tipo, en comparación con los métodos tradicionales.
4. Conclusión
El uso de Drones se ha vuelto cada vez más común en varias áreas de la ingeniería, estimulado principalmente por la popularización de esta tecnología y las diversas posibilidades que ofrece. Sin embargo, su uso debe ser evaluado previamente y las metodologías tradicionales deben ser adecuadas para que los resultados que brinde este equipo sean confiables. El presente estudio demostró el uso de Drones para inspeccionar patologías en pavimentos asfálticos, en base a la Norma DNIT 006/2003 - PRO, obteniendo aproximadamente un 94,4% de acierto, teniendo en cuenta los resultados con la metodología tradicional, con reducción significativa del tiempo de funcionamiento con menos de 1/3 del tiempo empleado. Cabe destacar también que la presente otorga subvenciones para la mejora del proceso de evaluación vial, permitiendo lograr la mejor aplicación posible de los recursos públicos disponibles y ofreciendo un transporte por carretera seguro, compatible y económico. El método propuesto se puede refinar aún más mediante el uso de Drones con sensores multiespectrales, generando otros resultados que, a través de imágenes infrarrojas o tridimensionales, pueden agregar valor e información diferente al servicio relacionado con las inspecciones de pavimentos, aumentando también la efectividad de la metodología. alternativa.
6. Referencias
Andrade, M. O., Maia, M. L. A., Lima Neto, O. C. C. (2015), “Impactos de investimentos em infraestruturas rodoviárias sobre o desenvolvimento regional no Brasil - possibilidades e limitações”. Transportes v. 23, n. 3. https://doi.org/10.14295/transportes.v23i3.797
Branco, L. H. C. (2016), “MANIAC: uma metodologia para o monitoramento automatizado das condições dos pavimentos utilizando VANTs”. 2016. Tese (Doutorado em Infra-Estrutura de Transportes) - Escola de Engenharia de São Carlos, Universidade de São Paulo, São Carlos.
Breen, B., Brooks, J. D., Jones, M. L. R., Robertsons, J., Betschart, S., Kung, O., Cary, S. C., Lee, C. K., Pointing, S. B. (2015), “Aplication of an unmanned aerial vehicle in spatial mapping of terrestrial biology and human disturbance in the McMurdo Dry Valleys, East Antarctica”, Polar Biology, v.38, n.4, p.573-578. https://doi.org/10.1007/s00300-014-1586-7
Confederação Nacional dos Transportes (2017). Pesquisa de Rodovias: Principais Dados”. CNT. Disponível em: http://pesquisarodovias.cnt.org.br/Paginas/resumo-para-imprensa
Departamento Nacional de Infraestrutura de Transporte (2003). DNIT 006/2003 - PRO: “Avaliação objetiva da superficie de pavimentos flexíveis e semi-rígidos - Procedimento”. Rio de Janeiro: 2003. 10p. Disponível em: http://ipr.dnit.gov.br/normas-e-manuais/normas/procedimento-pro/dnit006_2003_pro.pdf. Acesso em: 09 abr. 2018.
Melo, R.R.S. 2016. “Diretrizes para inspeção de segurança em canteiros de obra por meio de imageamento com Veículo Aéreo Não Tripulado (VANT)”. 160 f. Dissertação (Mestrado) - Curso de Engenharia Civil, Universidade Federal da Bahia, Salvador, 2016.
Nishar, A., Richards, S., Breen, D., Robertson, J., Breen, B. (2016), “Thermal infrared imaging of geothermal environments and by an unmanned aerial vehicle (UAV): A case study of the Wairakei - Tauhara geothermal field, Taupo, New Zealand”, Renewable Energy, 86, 1256 - 1264. https://doi.org/10.1016/j.renene.2015.09.042
Parente, D. C., Felix, N. C., Picanço, A. P. (2017). Uso de vehículo aéreo no tripulado (VANT) en la identificación de patología superficial en pavimento asfáltico. Revista ALCONPAT, 7(2), 160 - 171. https://doi.org/10.21041/ra.v7i2.161
Vieira, S., Pinho Júnior, A., Oliveira, F., Aguiar, M. (2016). Análise comparativa de metodologias de avaliação de pavimentos através do IGG e PCI. Conexões - Ciência e Tecnologia, 10(3), 20-30. https://doi.org/10.21439/conexoes.v10i3.799