
| Applied Research | https://doi.org/10.21041/ra.v11i1.517 |
Inspection of facades with Unmanned Aerial Vehicles (UAV): an exploratory study
Inspeção de fachadas com Veículos Aéreos Não Tripulados (VANT): estudo exploratório
Inspección de fachadas con Vehículos Aéreos no Tripulados (VANT): estudio exploratorio
R. D. B.
Ruiz1
*
![]() , A. C. Lordsleem1
, A. C. Lordsleem1
![]() , J. H. A. Rocha2
, J. H. A. Rocha2
![]()
1 Polytechnic School of Pernambuco, University of Pernambuco, Recife, Brazil..
2 Departamento de Ingeniería Civil, Facultad de Tecnología, Universidad Privada del Valle, Cochabamba, Bolivia.
*Contact author: Ramiro.DBR@hotmail.com
Reception: October 07, 2020.
Acceptance: December 16, 2020.
Publication: January 01, 2021.
| Cite as: Silva, Ruiz, R. D. B., Lordsleem Júnior, A. C., Rocha, J. H. A. (2021), "Inspection of facades with Unmanned Aerial Vehicles (UAV): an exploratory study", Revista ALCONPAT, 11 (1), pp. 88 – 104, DOI: https://doi.org/10.21041/ra.v11i1.517 |
Abstract
The objective of this study was to evaluate the use of Unmanned Aerial Vehicles (UAVs) as a visual tool for the inspection of pathological manifestations in facades, through an exploratory study. Currently, the relevance of UAVsis growing as a new mechanism for obtaining data and visual inspection of buildings, optimizing time. The research strategy had three distinct steps: a literature review, an experimental procedure, and data processing, aiming to verify the viability of the inspection procedure. There is evidence of the convenience of UAV use, particularly where access is difficult, which reduces time and cost, generates greater security, and allows 3D reconstruction of the building under inspection, generating more accurate diagnoses.
Keywords:
UAV,
property inspection,
visual inspection,
monitoring,
aerial photos
Resumo
O objetivo desta pesquisa consistiu em avaliar o uso de VANT como ferramenta visual para a inspeção de manifestações patológicas em fachadas a través de um estudo exploratório. Na atualidade, os Veículos Aéreos Não Tripulados (VANT) assumem uma crescente relevância na construção civil como novo mecanismo de obtenção de dados e inspeção visual, otimizando o tempo. A estratégia de pesquisa considera três etapas distintas: revisão bibliográfica, o procedimento experimental e, finalmente o processamento de dados, objetivando verificar a viabilidade do procedimento de inspeção. Evidencia-se a conveniência de utilização do VANT particularmente onde o acesso é difícil, o que pode reduzir tempo, custos e gerar maior segurança, além da reconstrução 3D da edificação para ser inspecionada e gerar diagnósticos mais certeiros.
Palavras-chave:
VANT,
inspeção predial,
inspeção visual,
monitoramento,
fotos aéreas
Resumen
El objetivo de esta investigación consistió en evaluar el uso de VANT como herramienta visual para la inspección de manifestaciones patológicas en fachadas a través de un estudio exploratorio. En la actualidad, los Vehículos Aéreos no Tripulados (VANT) asumen una creciente relevancia en la construcción civil como nuevo mecanismo de obtención de datos e inspección visual, optimizando el tiempo. La estrategia de investigación considera tres etapas distintas: revisión bibliográfica, el procedimiento experimental y, finalmente, el procesamiento de datos, con el objetivo de verificar la viabilidad del procedimiento de inspección. Se evidencia la conveniencia de utilizar el VANT particularmente donde el acceso es difícil, lo que puede reducir tiempo, costos y generar mayor seguridad, además de la reconstrucción 3D de la edificación para ser inspeccionada y generar diagnósticos más certeros.
Palabras clave:
VANT,
inspección predial,
inspección visual,
monitoreo,
fotos aéreas
1. Introduction
Visual inspection of building facades seeks to assess the state of conservation of the vertical facade and the elements that comprise it, providing guidelines for effective maintenance with an adequate cost-benefit ratio. This practice makes it possible to guarantee the proper functioning of the vertical facade system, allowing it to fulfill the functions for which it was built and potentially extend its useful life (Pires et al., 2015; Flores-Colen et al., 2008).
To this end, an effective methodology that reduces both time and cost is visual inspection using Unmanned Aerial Vehicles (UAVs) (Melo and Costa, 2015). With the aid of this technology, it is possible to completely film and capture High Definition (HD) photographs of all of the principal points investigated. This detailed investigation can discover problems not visible to the naked eye from the ground, such as: infiltration, detachment, or holes in the covering and/or fissures and cracks in the facade (Tondelo and Barth, 2019).
Currently, in Brazil, visual inspection of buildings is mostly performed through the traditional method. Professional industrial climbers can perform visual verification and create a photographic record of the principal points to be analyzed, however, the cost and time are greater when compared to a survey using UAVs. According to data released by the Public Ministry, 40% of work accidents in Brazil are related to falls from height (EXAME, 2018).
The term UAV refers to a class of aircraft piloted remotely or automatically using predefined coordinates, an emerging technology known for its role in military applications (Irizarry and Costa, 2016).
More recently, both in Brazil and other countries, the use of these aerial vehicles in civilian environments has become increasingly common, in areas such as agriculture, forestry, archeology, architecture, and construction (Roca et al., 2013; Máthé and Buşoniu, 2015; Morgenthal and Hallermann, 2015; Nikolic et al., 2013; Hung et al., 2018; Yang et al., 2015; De Melo et al., 2017; Falorca and Lanzinha, 2020).
It was only in 2017 that the Brazilian law regulating general requirements for unmanned civilian aircraft was published by the National Civil Aviation Agency (ANAC), known as Brazilian Special Civil Aviation Regulation (RBAC-E) nº 94 (ANAC, 2017). This special regulation establishes the conditions for the operation of UAVs in Brazilian territory, taking into consideration their current stage of development, in order to promote their safe and sustainable use.
The use of UAVs in the construction industry is still limited (Melo and Costa, 2015), although this technology can be used in a variety of ways. Visual inspection of large construction projects to verify performance conditions and determine necessary preventive and corrective measures deserves special attention, due to the inherent complexity (height, size, difficulty of access, and exposure). UAVs can reduce the time required for these monitoring operations, as well as assist in other potentially hazardous inspection processes (Álvares et al., 2016).
The objective of this study is to evaluate the use of Unmanned Aerial Vehicles (UAVs) as a visual tool for inspecting pathological manifestations on facades through an exploratory study, in order to verify the feasibility of use and aiming to develop guidelines that integrate aerial image collection, data processing, and visual analysis.
2. UAVs in visual inspection
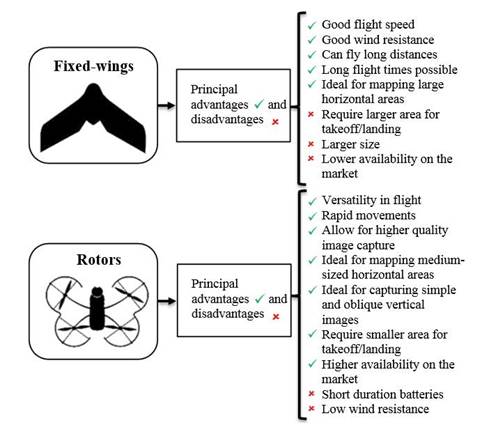
Different types of UAVs are useful for the purpose of visually inspected buildings. Among them, those supported by rotating wings, when compared to fixed wing craft, allow for quicker displacement and greater versatility in flight, being effective in collecting horizontal images in areas of medium extension, as in the case of Vera (2016).
Similarly, the versatility of this aircraft allows it to move on all possible axes, being effective in capturing simple vertical and oblique vertical images as shown in the case studies of Mader et al. (2016), Morgenthal and Hallermann (2015), and Reagan et al. (2018) in the detection of specific surfaces or elements, making it a useful tool for the visual inspection of vertical facades or, as in the case of Irizarry and Costa (2016), a visual tool for construction site management. Figure 1 presents the summary of the main advantages and disadvantages of vehicles with fixed and rotating wings.
 |
||||
| Figure 1. Advantages and disadvantages of UAVs depending on wing type. | ||||
According to the International Civil Aviation Organization (ICAO, 2017), any aircraft intended to fly without a pilot on board is referred to as an RPAS (Remotely Piloted Aircraft System). The rotary-wing UAVs used in these studies are classified by ANAC as RPAS Class 3, which have fewer flight requirements and restrictions, making it possible to use them in urban areas and at construction sites (Brazil, 2017).
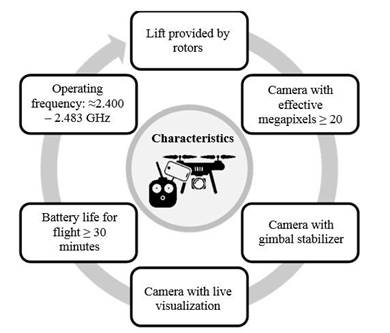
These vehicles are also usually simple to fly, supported by a set of engines controlled by a sophisticated electronic system that generally guarantees the aircraft’s stability, allowing for vertical takeoff and landing. They are therefore the preferred choice for carrying cameras and other objects for short distances from the takeoff point. Figure 2 shows the minimum suggested equipment characteristics for the purpose of visual inspection of facades.
 |
||||
| Figure 2. Minimum equipment characteristics for visual inspection of facades. | ||||
It is important to note that the current ease of acquiring a UAV does not mean that the user will be able to pilot the equipment. There are rules, standards, and procedures for becoming an Unmanned Aerial Vehicle pilot (Aguilar, 2018), which are specified in RBAC-E nº 94 Resolution n. 419 (Brazil, 2017).
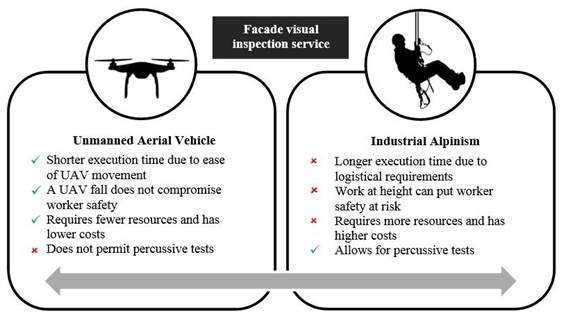
In recent years, there has been an increase in the use of UAVs for inspection of structures, specifically buildings, due to their long range, area photogrammetry applications, efficient data recording, speed, security, and low cost, among others reasons (Izarry and Costa , 2016; Shariq and Hughes, 2020; Groso et al., 2020). In Figure 3, the advantages reported in the bibliographic review for the use of UAVs are compared to one of the most used traditional methods, industrial climbing.
 |
||||
| Figure 3. Comparison of visual façade inspection procedures. | ||||
3. Experimental procedure
Based on guidelines derived from the literature review and with an objective of verifying the feasibility of UAVs for inspection of pathological manifestations in facades, the Institute of Technological Innovation (IIT) at the University of Pernambuco was selected. This building (Figure 4) has four floors and is in Pernambuco’s PARQTEL (Electro-electronic Technological Park), in the Curado district (Figure 4). This building was selected because of its geometric characteristics (multiple facades) and its isolated location regarding other nearby buildings, making it ideal for training and perfecting flights with the UAV and developing flight protocols.
 |
||||
| Figure 4. UPE Institute of Technological Innovation. Adapted from Google (2018). | ||||
Following this, training was carried out on the operation of the UAV. In this phase, test flights were performed around the building, in order to collect data and analyze what could be visualized through the imagery obtained, making it possible to refine the collection method and technical procedures necessary to perform such an operation following the required safety criteria. In summary, this step included training in the use of the technology, and the technical understanding of the equipment.
To perform the field surveys, the Phantom 4 Pro model V2.0 UAV, manufactured by DJI, was used, equipped with a 1” 20 MP camera, able to record videos in 4K 60 fps and shoot at 14 fps in continuous shooting mode. The UAV is controlled by a remote with built-in HD high illumination display and contains a lithium battery that offers 30 minutes of maximum flight time. Table 1 presents some additional features of the Phantom 4 Pro V2.0.
| Table 1. Technical characteristics of the Phantom 4 Pro V2.0 | ||||||||||||||
| Specifications | Phantom 4 Pro V2.0 | |||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Weight (including battery and propellers) | 1388 g | |||||||||||||
| Maximum flight time | 30 min | |||||||||||||
| Viewing system | Front, back, and below | |||||||||||||
| Obstacle detection | Front and back | |||||||||||||
| Infrared left and right | ||||||||||||||
| Video transmission system | Lightbridge | |||||||||||||
| Lens | FOV 84° 8.8 mm/24 mm (35 mm equivalent format) f/2.8 - f/11 autofocus at 1 m - ∞ | |||||||||||||
| Operating frequency | 2.4 GHz/5.8 GHz | |||||||||||||
| 5.8 GHz transmission is not available in some regions due to local regulations | ||||||||||||||
| Source: DJI (2017) | ||||||||||||||
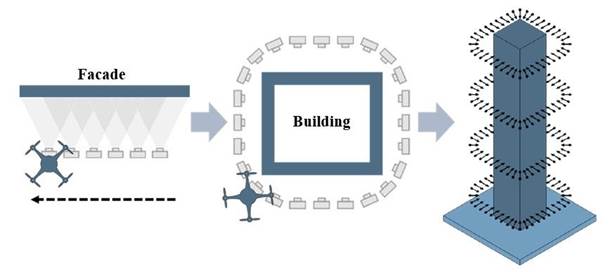
The data capture strategy followed the basic concepts of digital photogrammetry, seeking parallelism among photo positions and perpendicularity to the plane of the object of interest, as shown in Figure 5, and for each part of the object to be photographed from at least two different positions, guaranteeing image overlap (Groetelaars, 2015). These aspects are important for the correlations required to construct orthomosaics or three-dimensional reconstructions.
 |
||||
| Figure 5. Image capture strategy. Adapted from Melo Jr (2016). | ||||
In total, eight experimental flights were carried out during four field tests, with a flight counted as each takeoff and landing, including when changing the SD memory or recharging the battery.
The protocols for the activities to be carried out include filling out the form for the planning meeting (standardizes data collection to prepare the flight plan, define the takeoff and landing points, and indicate the areas covered for 3D modeling) and the mission checklist for the UAV (registration of flight technical data and a checklist of all procedures necessary for operation of the UAV in adequate safety conditions). The tests began in August 2018, resulting in approximately 2 hours and 30 minutes of flight training, as shown in Table 2 in the flight log spreadsheet (list of all physical flight data recorded in the application to be adopted and in the mission checklist). Among the information recorded during the flight using the DJI Go App, were the number of visual assets collected (photos and videos), distance, maximum altitude, flight duration, photographic overlay, and flight speed.
| Table 2. Experimental flight data (flight log spreadsheet) | ||||||||||||||
| Nº | Time | Number of photos | Distance (m) | Maximum height (m) | Flight duration (min) | Photographic overlap (%) | Flight velocity (km/h) | |||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 11:14 | 2 | 20 | 5 | 15 | 0 | 10 | |||||||
| 2 | 11:40 | 35 | 8 | 16 | 12 | 75 | 4 | |||||||
| 3 | 09:52 | 108 | 4 | 24 | 27 | 75 | 3 | |||||||
| 4 | 11:31 | 95 | 4 | 35 | 28 | 75 | 3 | |||||||
| 5 | 14:15 | 42 | 6 | 92 | 8 | 75 | 3 | |||||||
| 6 | 14:27 | 67 | 8 | 35 | 19 | 75 | 4 | |||||||
| 7 | 15:50 | 87 | 8 | 36 | 25 | 75 | 4 | |||||||
| 8 | 15:25 | 35 | 50 | 120 | 24 | 90 | 10 | |||||||
4. Data processing
After verifying the quality of the visual assets, it was determined that the photos collected during flights number 2, 6, and 7 presented excellent visual quality and distance ratio, 8 m away from the facade, and, consequently, a distance between stations of 1.8 m in the vertical direction and 3.2 m in the horizontal direction.
According to Ballesteros (2020) and Pierrot-Deseilligny et al. (2011), this ratio between the distance in position of the stations for taking photographs and distance from the stations to the photographed facade is ideal for 3D reconstruction. If this ratio is very small, the automatic correlation of the points is facilitated, but the geometric accuracy in the digital reconstruction of the facade becomes more difficult.
The 189 photographs collected 8 m from the facade were therefore selected for processing using the stereo matching technique, a process that finds corresponding points (Smartmatches) in two or more images.
Reconstruction in 3D is possible as long as there are at least two images of the same scene, obtained from different positions (different projection centers) such that, from the position, orientation, and focal distance, it becomes possible to determine the position of points in space from the two-dimensional coordinates of the images through the principles of epipolar geometry (Melo Jr., 2016).
In other words, photo-based scanning software compares small areas made up of a set of pixels present in two or more photos that, in turn, are formed by the textures or contrasting marks on the surface of the object or scene. The comparison process continues until the program finds the best matches between the images. When optimal or ideal matches are found, the position and orientation information already computed for the photographs is used to calculate the spatial location of the point.
The stereo matching software selected for this 3D reconstruction was Agisoft PhotoScan. This stage of the study aimed to defining the procedures and steps necessary for the proper development of 3D mapping and the generation of orthomosaics using UAVs. Therefore, the corresponding sequence of processing steps in the Agisoft PhotoScan software and the parameters used for the processing are described in Table 3.
5. Results and discussion
The first step consisted of the alignment of the images (align photos), in which Agisoft PhotoScan seeks similarities between the images. The result is the generation of a cloud of tie points, the basic product for the generation of the densified point cloud and 3D models, as well as the connection point between the orthophotos in the mosaic process and the generation of the orthophoto mosaic.
In this step, support points were also collected in the field to improve positional accuracy of the point cloud, followed by the elimination of unwanted points or noise, such as: poorly captured surfaces, areas belonging to other objects, and distant points. The final result from this step was the model shown in Figure 6, a sparse or low-density point cloud, which also defines the building's geometry.
In the second step, the dense cloud of 3D points was built by filtering unwanted points or noise. From the estimated camera positions, the software calculates depth information for each camera to be combined at a single point in the dense cloud.
The highest level was chosen for the densification configuration, generating more than 22 million points. The main function of this step is to densify the point cloud generated in the previous process, increasing the number of points in the point cloud and reducing the empty spaces to better represent the mapped area. The model generated in this step is shown in Figure 7, with most of the geometric details of the building digitally reconstructed.
In the third step, the mesh was built, generated from the grouping of vertices from the dense point cloud. The 3D model generated in this step is shown in Figure 8, with more than 500,000 faces (or adjacent polygons) sharing edges of the object's boundary surface.
Note that the required number of faces for a model are related to the level of detail expected from it. The higher the level, the higher the computational cost (time needed for processing and hardware performance required). If the model is generated from the sparse point cloud, the number of faces and vertices will naturally be fewer.
In the fifth and final step, generation of the orthomosaic, the orthorectification of the images was carried out, with the image features projected orthogonally at constant scale, without displacements due to relief or the inclination of the camera. With the images properly corrected, the software mosaics the orthophoto to create a single product.
In the fourth step, the goal is to apply a texture to the three-dimensional model to improve its visual aspect, in order to allow visualization of the pathologies on the facade. The textured 3D model generated in this step is shown in Figure 9.
The Agisoft PhotoScan software allows orthomosaics to be exported from previously generated models. For example, Figure 10 shows the orthomosaic corresponding to the south facade of the IIT building.
The final product of these processing steps was the 3D digital model shown in Figure 11. A satisfactory result in terms of geometric reconstruction is exportable in various formats for various uses, according to the desired application.
However, the quality of this model is insufficient for the purpose of detecting pathologies on the facade, due to distortions on the texturized facades.
Authors such as Roca et al. (2018) and Rakha and Gorodetsky (2018) also generated 3D models in their respective studies and highlighted some limitations. Rodriguez-Gonzalvez et al. (2014) also pointed out that 3D reconstruction has limitations regarding the quality and integrity of the structure inspected.
Orthomosaics of each building facade were created to provide stronger and more useful results. These orthorectified images are of enough quality to allow for the detection of pathological manifestations through visual inspection.
This is shown in Figure 12, in which the orthomosaic of the south facade made possible to discover cracking in the ceramic coating, the beginning of efflorescence, and pathologies resulting from biological processes (mold and mildew).
Lastly, following the literature review and the development of the experimental study, the use of UAVs to detect pathological manifestations in facades was shown to be viable, as was also reported in the study by Tondelo and Barth (2019).
The use of UAVs for facade inspection is an alternative to the traditional method, providing the information necessary to diagnose the structure. The results can be obtained when a multi-rotor UAV with an HD camera is available, as used in the current study and pointed out by Falorca and Laninha (2020).
Although the current study was limited to the use of UAVs as a visual tool for inspecting pathological manifestations of facades, different techniques, such as deep learning, can be combined to assist and automate visual inspection, as proposed by Ruiz et al. (2021).
A need was identified to create a procedure that allows the visual inspection technique to be structured step by step using this technology. The procedure would include a suitable flight protocol for these purposes, and would also idealize the stages of data capture, storage, processing, and post-processing. Consequently, it is possible to guarantee the advantages of this procedure regarding the traditional inspection model, which includes industrial alpinism.
6. Conclusions
Following the elaboration of this study, the importance of the correct choice of UAV based on the different functions it can fulfill was highlighted. UAVs may have significant advantages and disadvantages according to their design characteristics, mainly depending on their lift type: rotors or fixed wings. For the specific case of visual inspection of facades, as already discussed, vehicles with rotors, a gimbal, and an aerial camera are ideal, providing agility and high quality in capturing high resolution images or video of the different points on the vertical walls or analysis elements. This refined procedure can expose problems not visible to the naked eye from ground level, such as: infiltration, detachment, mold, mildew, fissures, and cracks in the coating.
The convenient inclusion of this type of UAV in Brazilian legislation and its minor restrictions, allow for commercialization on a larger scale and generally at a lower price than its fixed-wing counterpart, making it more accessible to the public. It is recommended that the vehicle meet the minimum characteristics discussed above. Currently, commercial UAVs still have technical limitations, mainly regarding battery life and charging capacity. However, future perspectives point to the continuous development of this technology, mitigating these limitations and expanding the scenarios where this technology can be employed within the construction industry.
According to the experimental procedure and the preliminary results, it should be noted that the Agisoft PhotoScan software allows for a wide range of options regarding the quality of the result, from low resolution to highly elaborated, with an increasing computational cost.
With regard to the quality analysis of the 3D mappings developed, it is possible to state that the quality of the textured 3D models still does not reach sufficient quality to detect pathologies on the facades, although its use has not yet been ruled out, as this quality may be improvable with more powerful cameras and more trained image capture procedures. On the other hand, the orthomosaics generated from these models have quality enough to allow for visual inspection. The visual assets obtained indicate that both can be usable, presenting satisfactory general results.
There is sufficient evidence to emphasize the various advantages of using this vehicle as an efficient and flexible tool for inspection in the construction industry. Ultimately, these advantages allow a service to be performed with greater security, greater speed, and at lower cost, requiring fewer resources compared to the traditional method of industrial alpinism. The increasing development of this technology, combined with other types of cameras and sensors, will allow access to places previously inaccessible to humans and other technologies and make it feasible not only for visual inspection of facades, but also for other areas of construction.
7. Acknowledgements
This study was carried out with the support of the Coordination for the Improvement of Higher Education Personnel - Brazil - (CAPES) - Financing Code 001.
References
Agostinho, S. L. (2012), “Inspeção e Monitorização de Estruturas em Engenharia Civil - Utilização de UAV na Inspeção e Monitorização”, Masther’s Thesis, Universidade da Madeira, p. 105.
Álvares, J., Costa, D. B., Melo, R. R. S., Bello, A. (2016). “Estudo exploratório de mapeamento 3D de canteiros de obras utilizando veículos aéreos não tripulados” in: VI ENTAC, São Paulo: São Paulo (Brasil).
Ballesteros, R. (2020), “Inspeção de manifestações patológicas de fachadas utilizando Veículo Aéreo Não Tripulado (VANT): estudo exploratório”, Masther’s Thesis, Escola Politécnica de Pernambuco, Universidade de Pernambuco, p. 220.
Brasil. Agência Nacional de Aviação Civil. Requisitos gerais para aeronaves não tripuladas de uso civil - RBAC-E nº 94. Resolução n. 419, 2 de maio de 2017. Brasília, 2017.
De Melo, R., Costa, D., Álvares, J., Irizarry, J. (2017), Applicability of unmanned aerial system (UAS) for safety inspection on construction sites. Safety Science. 98:174-185. https://doi.org/10.1016/j.ssci.2017.06.008
Recuperado em 26 de setembro de 2020 DJI (2017). Phantom 4 Pro Homepage. de https://dl.djicdn.com/downloads/phantom_4_pro/20170719/Phantom_4_Pro_Pro_Plus_User_Manual_EN.pdf
Emelianov, S., Bulgakow, A., Sayfeddine, D. (2014). “Aerial laser inspection of buildings facades using quadrotor” in: Creative Construction Conference, Prague (Czech Republic).
Recuperado em 26 de setembro de 2020 EXAME. Revista Online Grupo Abril. (2016). de https://www.exame.abril.com.br
ahead-of-print Falorca, J. F., Lanzinha, J. C. G. (2020). Facade inspections with drones-theoretical analysis and exploratory tests. International Journal of Building Pathology and Adaptation, . https://doi.org/10.1108/IJBPA-07-2019-0063
Flores-Colen, I., De Brito, J., De Freitas, V. (2018). Stains in facades’ rendering - Diagnosis and maintenance techniques’ classification. Construction and Building Materials. 22(3):211-221. https://doi.org/10.1016/j.conbuildmat.2006.08.023
Groetelaars, N. J. (2015), “Criação de modelos BIM a partir de nuvens de pontos: estudo de métodos e técnicas para documentação arquitetônica”, Doctoral Dissertation, Universidade Federal da Bahia, Faculdade de Arquitetura, Brasil.
Grosso, R., Mecca, U., Moglia, G., Prizzon, F., Rebaudengo, M. (2020). Collecting Built Environment Information Using UAVs: Time and Applicability in Building Inspection Activities. Sustainability. 12:4731 . https://doi.org/10.3390/su12114731
Hung, M. N. W. B., Sampaio, T. V. M., Schultz, G. B., Siefert, C. A. C., Lange, D. R., Marangon, F. H. S., Santos, I. (2018). Levantamento com veículo aéreo não tripulado para geração de modelo digital do terreno em bacia experimental com vegetação florestal esparsa. Revista Ra'e Ga Espaço Geográfico em Análise. 43:215-231. http://dx.doi.org/10.5380/raega.v43i0.56621
ICAO - International Civil Aviation Organization. (2017). Remotely Piloted Aircraft System (RPAS) concept of operations for international IFR operations. ICAO (USA), p. 30.
Irizarry, J., Costa, D.B. (2016). Exploratory Study of Potential Applications of Unmanned Aerial Systems for Construction Management Tasks. Journal of Management in Engineering. 32(3):1-10. https://doi.org/10.1061/(ASCE)ME.1943-5479.0000422
Kim, S., Irizarry, J., Costa, D. B., Mendes, A. T. C. (2016). “Lessons learned from unmanned aerial system-based 3D mapping experiments” in: 52nd ASC Anual International Conference, Provo: Utah (USA).
b2700-b2700 Liberati, A., Altman, D. G., Tetzlaff, J., Mulrow, C., Gotzsche, P. C., Ioannidis, J. P. A., Clarke, M., Devereaux, P., Kleijnen, J., Moher, D. (2009). The PRISMA statement for reporting systematic reviews and meta-analyses of studies that evaluate healthcare interventions: explanation and elaboration. BMJ, 339:. https://doi.org/10.1136/bmj.b2700
Mader, D., Blaskow, R., Westfeld, P., Weller, C. (2016). Potential of UAV-Based laser scanner and multispectral camera data in building inspection. International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences. XLI-B1:1135-1142. https://doi.org/10.5194/isprs-archives-XLI-B1-1135-2016
Máthé, K., Buşoniu, L. (2015). Vision and Control for UAVs: A Survey of General Methods and of Inexpensive Platforms for Infrastructure Inspection. Sensors. 15(7):14887-14916 . https://doi.org/10.3390/s150714887
Melo Jr., C. M. (2016), “Methodology for generating façade damage maps from unmanned aerial vehicle photographs and digital image processing”, Doctoral Dissertation, Universidad de Brasilia, Brasil.
Melo, R. R. S., Costa, D. B. (2015). “Uso de veículo aéreo não tripulado (VANT) para inspeção de logística em canteiros de obra” in: SIBRAGEC-ELAGEC, São Carlos: São Paulo (Brasil).
Morgenthal, G., Hallermann, N. (2014). Quality Assessment of Unmanned Aerial Vehicle (UAV) Based Visual Inspection of Structures. Advances in Structural Engineering. 17(3):289-302. https://doi.org/10.1260/1369-4332.17.3.289
Monograph Nascimento, M. L. M. (2017), “Utilização de drone e termografia na detecção de manifestações patológicas em edificações”, , Universidade Católica de Brasília, p. 21.
Nikolic, J., Burri, M., Rehder, J., Leutenegger, S., Huerzeler, C., Siegwart, R. (2013). “A UAV system for inspection of industrial facilities” in: 2013 IEEE Aerospace Conference, Big Sky: Montana (USA). https://doi.org/10.1109/AERO.2013.6496959
Pacheco, C., Vieira, G. (2017). “Metodologias para Inspeções de Fachadas de Edifícios” in: IV CIRMARE - Congresso Internacional na Recuperação, Manutenção e Restauração de Edifícios, São Paulo: São Paulo (Brasil).
Pierrot-Deseilligny, M., De Luca, L., Remondino, F. (2011). Automated image-based procedures for accurate artifacts 3D modeling and orthoimage generation. Geoinformatics CTU FCE. 6:291-299. https://doi.org/10.14311/gi.6.36
Monograph PiórkowskI, D. T. (2008). “Rectification and Intermediate View synthesis”, , Universitat Politecnica de Catalunya, p. 47.
Pires, R., De Brito, J., Amaro, B. (2015). Inspection, Diagnosis, and Rehabilitation System of Painted Rendered Façades. Journal of Performance of Constructed Facilities. 29(2):1-9. https://doi.org/10.1061/(ASCE)CF.1943-5509.0000534
Rakha, T., Gorodetsky, A. (2018). Review of Unmanned Aerial System (UAS) applications in the built environment: Towards automated building inspection procedures using drones. Automation in Construction. 93:252-264. https://doi.org/10.1016/j.autcon.2018.05.002
Reagan, D., Sabato, A., Niezrecki, C. (2018). Feasibility of using digital image correlation for unmanned aerial vehicle structural health monitoring of bridges. Structural Health Monitoring. 17(5):1056-1072. https://doi.org/10.1177/1475921717735326
Roca, R., Lagüela, S., Díaz-Vilariño, L., Armesto, J., Arias, P. (2013). Low-cost aerial unit for outdoor inspection of building façades. Automation in Construction . 36:128-135. https://doi.org/10.1016/j.autcon.2013.08.020
Rodriguez-Gonzalvez, P., Gonzalez-Aguilera, D., Lopez-Jimenez, G., Picon-Cabrera, I. (2014). Image-based modeling of built environment from an unmanned aerial system. Automation in Construction . 48:44-52. https://doi.org/10.1016/j.autcon.2014.08.010
Ruiz, R. D. B., Lordsleem Júnior, A. C., Fernandes, B. J. T., Oliveira, S. C. (2021). Unmanned Aerial Vehicles and Digital Image Processing with Deep Learning for the Detection of Pathological Manifestations on Facades. In: Toledo Santos E., Scheer S. (eds) Proceedings of the 18th International Conference on Computing in Civil and Building Engineering. ICCCBE 2020. Lecture Notes in Civil Engineering, vol 98. Springer, Cham. https://doi.org/10.1007/978-3-030-51295-8_76
109979 Shariq, M. H., Hughes, B. R. (2020). Revolutionising building inspection techniques to meet large-scale energy demands: A review of the state-of-the-art. Renewable and Sustainable Energy Reviews. 130:. https://doi.org/10.1016/j.rser.2020.109979
e019009 Tondelo, P. G., Barth, F. (2019). Análise das manifestações patológicas em fachadas por meio de inspeção com VANT. PARC Pesquisa Em Arquitetura E Construção, 10, . https://doi.org/10.20396/parc.v10i0.8652817
Vera-Rozo, E. (2016). Medición de contaminación mediante UAV (Vehículo Aéreo no Tripulado). Mundo FESC. 6(11): 16-26.
10562-10588 Yang, X., Qin, X., Wang, J., Wang, J., Ye, X., Qin, Q. (2015). Building Façade Recognition Using Oblique Aerial Images. Remote Sensing. 8(7): . https://doi.org/10.3390/rs70810562
Table 3. Workflow and parameters used for Agisoft PhotoScan.
Step
Parameters
1.- Align Photos
Accuracy:
Highest
Pair preselection:
Generic
Sparse cloud:
31.578
2.- Build Dense Cloud
Quality:
High
Depth filtering:
Aggressive
Dense cloud:
22.767.991
3.- Build mesh
Surface type:
Arbitrary 3D
Face count:
High
Faces:
533.755
4.- Build texture
Mapping mode:
Adaptive orthophoto
Blending mode:
Mosaic
5.- Build Orthomosaic
Type
Planar
Blending mode:
Mosaic
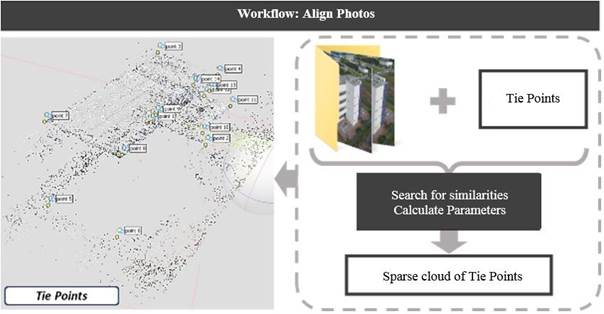
Figure 6.
Cloud of tie points for IIT-UPE
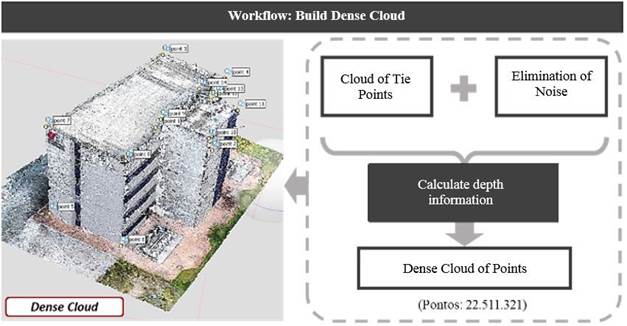
Figure 7.
Densified point cloud for IIT-UPE
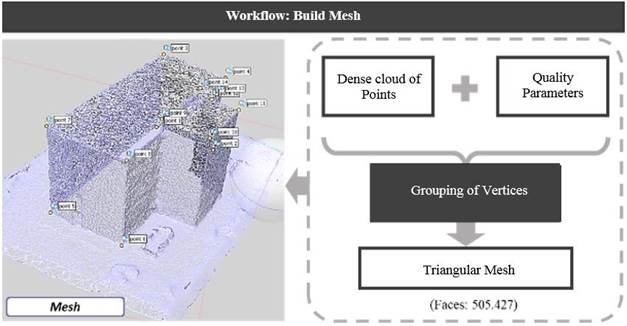
Figure 8.
Triangular mesh model of IIT-UPE
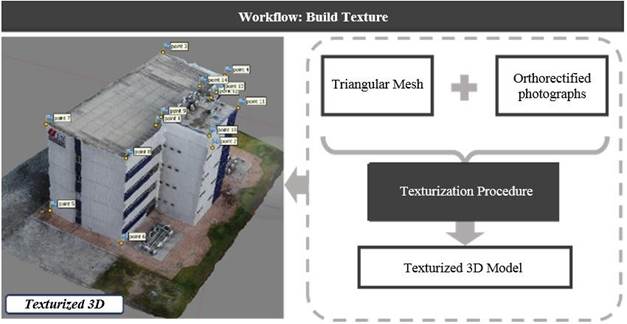
Figure 9.
Texturized model of IIT-UPE
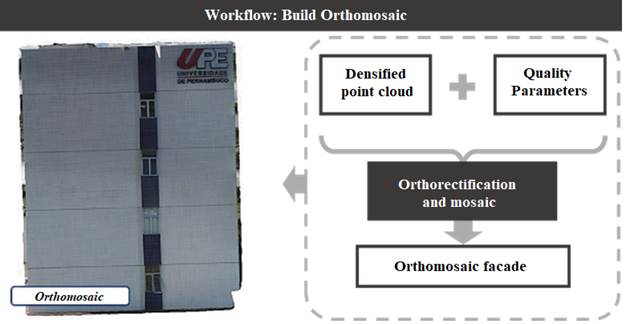
Figure 10.
Orthomosaic model of IIT-UPE south Orthomosaic facade
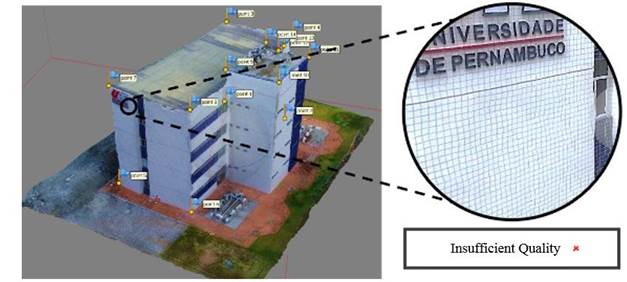
Figure 11.
Final product - IIT-UPE 3D texturized model
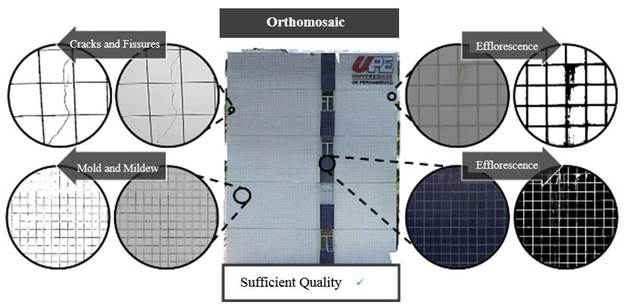
Figure 12.
Detection of pathological manifestation on the south facade of IIT-UPE